
Research direction: Micro-nano positioning
Experimental content: The piezoelectric ceramic actuator has hysteresis nonlinearity, which greatly reduces its motion accuracy. Due to the time-varying and asymmetric characteristics of its hysteresis, it increases the difficulty of hysteresis modeling and compensation. This experiment uses a single neuron adaptive control method to online compensate the hysteresis nonlinearity of the piezoelectric ceramic actuator, thereby improving the trajectory tracking performance of the piezoelectric ceramic actuator.
Test purpose: Verify the performance of the hysteresis compensation algorithm.
Test equipment: dSPACE real-time acquisition module, dynamic bridge strain gauge, high-frequency power amplifier SLA-HVP-437
Experimental process: Hardware connection and software running interface
The tested object is the PZS001 piezoelectric ceramic actuator produced by Thorlabs. Under the maximum driving voltage of 100V, its maximum displacement is 12.925μm. The SLA-HVP-437 amplifier is used to amplify the control piezoelectric into the driving voltage of the piezoelectric ceramic driver. The piezoelectric ceramic actuator comes with 4 resistance strain gauges, forming a 4-bridge resistance strain gauge. The SDY2105 bridge amplifier produced by Beidaihe Institute of Practical Electronic Technology was used to measure the deformation of the piezoelectric ceramic actuator. The hardware connection diagram of the test system is as follows:

The test program is written under Matlab/Simulink and run through the Microlabbox real-time controller produced by dSPACE.
Test process: First, a 0-10V sinusoidal signal is generated in the control program. After amplification by an amplifier, the piezoelectric ceramic is driven to move forward and backward. Microlabbox is used to complete real-time measurement of the control signal and displacement signal. Based on the characteristics of the piezoelectric ceramic, Write a single-neuron adaptive compensation algorithm and use equipment to complete the performance test of the algorithm.
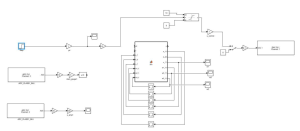
The Simulink code of the test program is shown below:
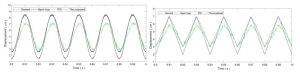
Test Results:
The effects of the control algorithm in tracking sinusoidal trajectories and triangular trajectories were tested respectively. For sinusoidal trajectories, the single-neuron adaptive compensation algorithm can effectively eliminate the influence of hysteresis nonlinearity. Compared with traditional PID control, the single-neuron adaptive compensation algorithm It has higher adaptability and robustness, and can well eliminate hysteresis nonlinearity for sinusoidal trajectories within 50Hz. For triangular trajectories, the single-neuron adaptive compensation algorithm can also achieve similar results. The experimental results are shown in the figure below:
The performance of the amplifier in this experiment:
The control signal is a weak current with a voltage range of 0-10V, which is not sufficient to drive the piezoelectric ceramic actuator. An amplifier is used to amplify the control signal to generate a driving voltage to drive the piezoelectric ceramics.
